1、Solidworksで6軸ロボットを自在に動かす方法
機器を設計する場合、ロボットの 動きがわからないと、配置や形状を設計するのが 困難であるが、ロボットの関節を動かして所定の 動きをさせるのがほぼ不可能である。
(複数の関節の回転運動で、ロボット先端を直線運動させることができるか?)
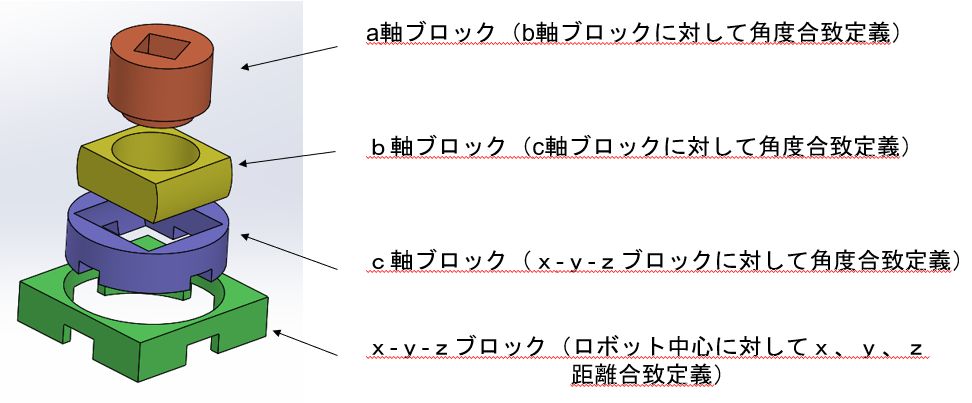
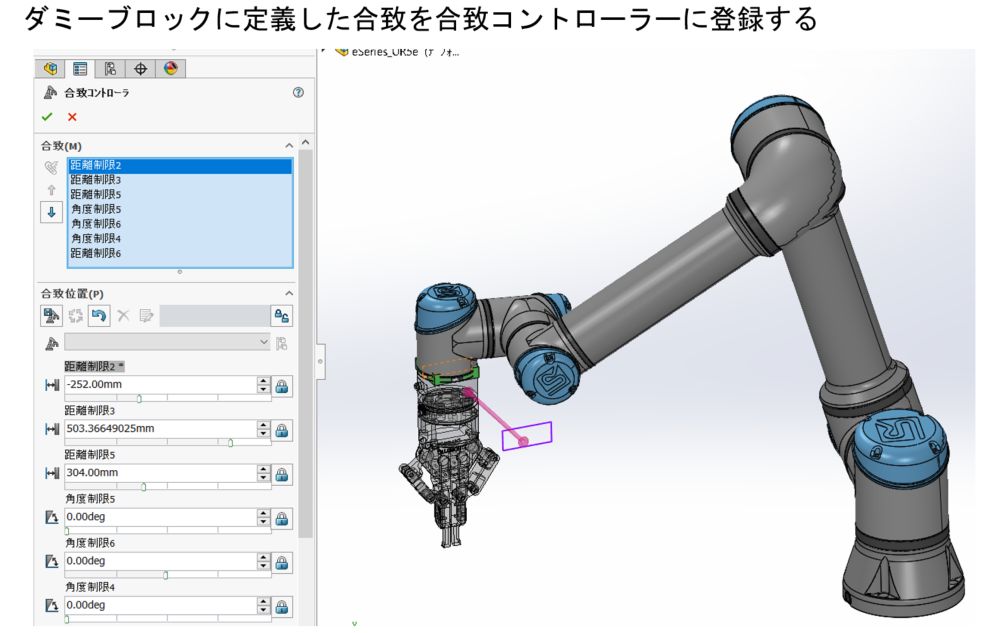
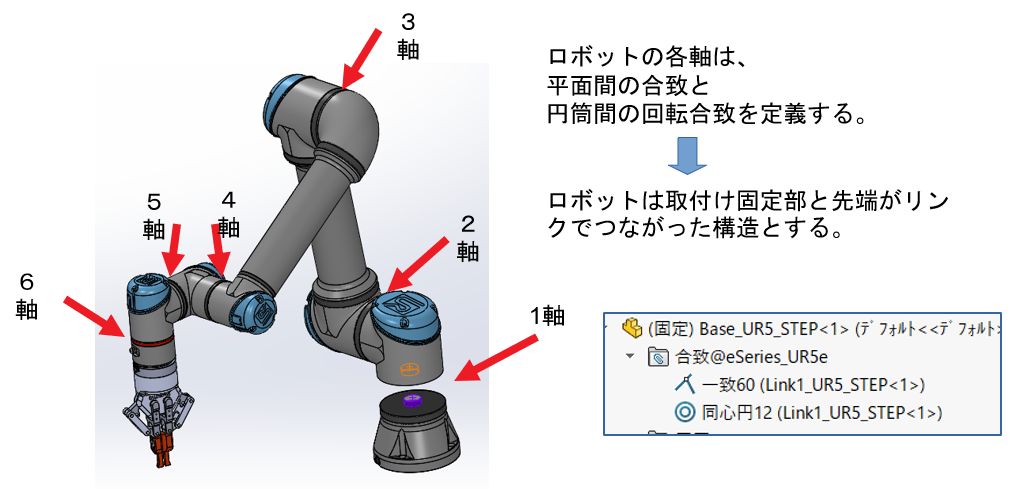
ロボット関節の各軸は回転だけ自由にできるリンク 構造とし、ロボット先端に6自由度(X,Y,Z,a,b,c)を表現するダミーの ブロックを配置する。それを合致コントローラーで 制御することで、ロボットの先端を自在に制御する
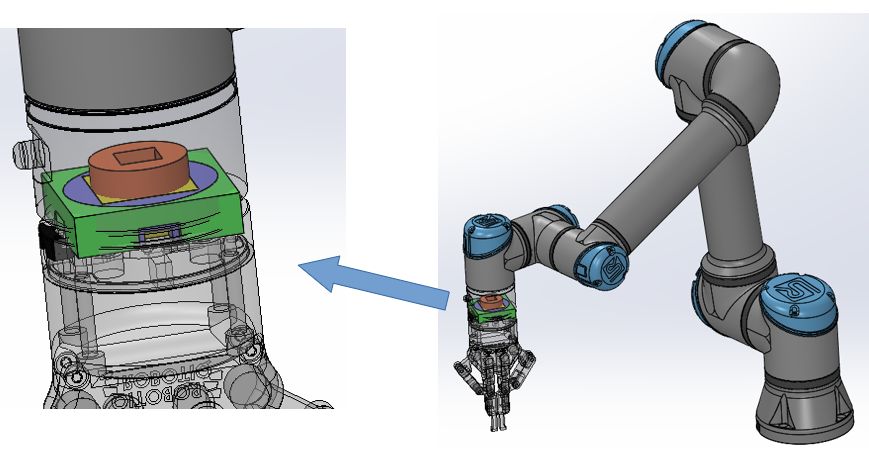
先端のダミーブロック配置
ダミーブロックの構成