2、Solidworksでロボットや周辺機器の自動運転の動きをさせる
ロボットや周辺機器を動かすには、多くのモーターが必要です。 又、それを適正なタイミングで正確に動かさないと、物を掴んだり、 交換したりすることは出来ません。 例えば、hpで公開しているロボットの動画では、下記に示したように11個のモーターが必要です。
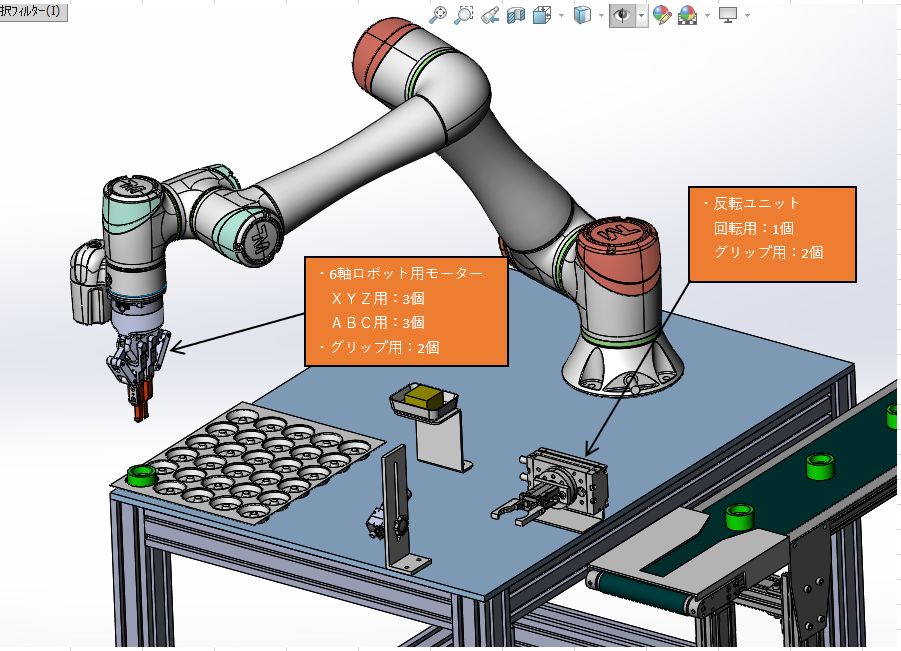
SolidworksのMotion解析では、11個のモーターを配置し、 正確に動きを開始する時間と動く量(速度)を定義する必要があります。

直接時刻と位置を入力することで動きを定義することもできますが、都度計算して入力するのは物理的に無理です。 その他、CSVファイルを読み込む方法もあります。但し、CSVファイルをエクセルで作成するにしても時刻や速度を手計算するのは、 複雑な動きの場合、非常に手間がかかります。

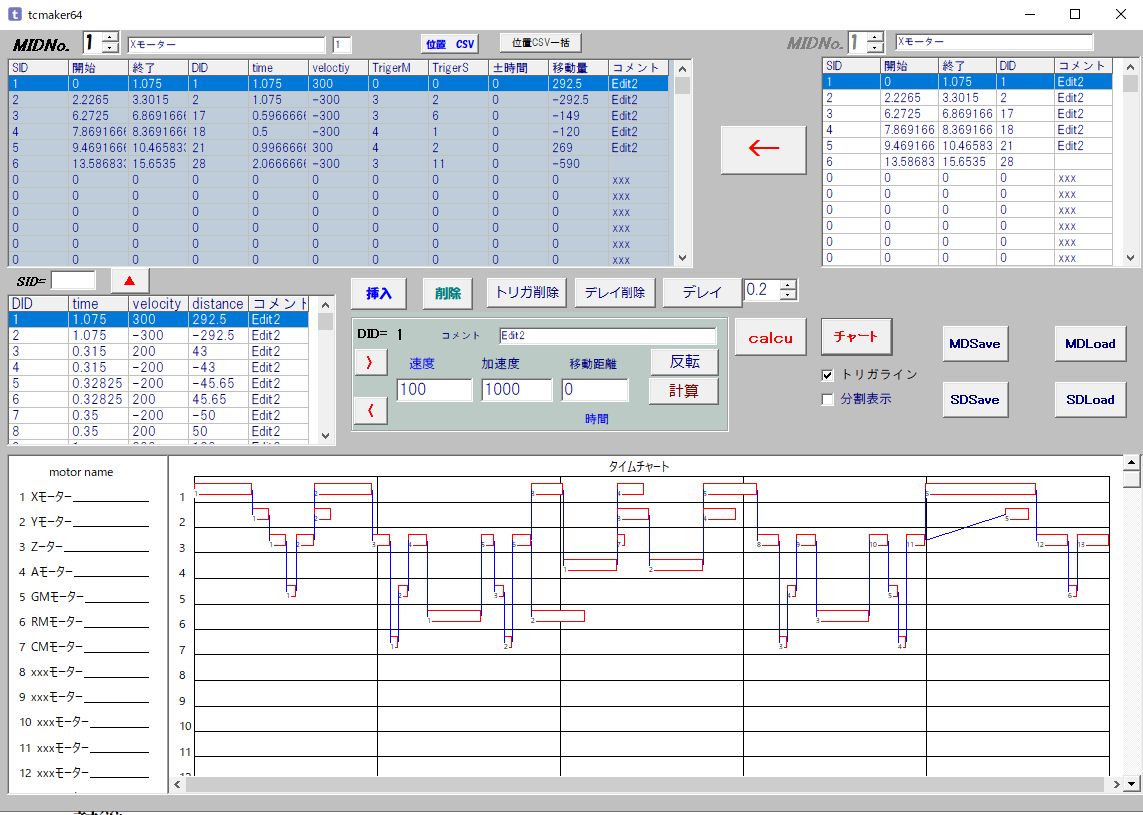
モーターの動きを移動量と速度、加速度で定義し、その並びを入力、それぞれの関係をトリガーで定義する タイムチャートソフトを作成して、自動計算で個々のモーターの動きのCSVファイル作成できるようにする。